1. Introduction to Autonomous Driving
1.1 Background
Autonomous Driving has been said to be the next big disruptive innovation in the years to come. Considered as being predominantly technology driven, it is supposed to have massive societal impact in all kinds of fields. In this section a brief overview on the technology and development will prove helpful to understand the need of customer acceptance on the topic that until now has been, as demonstrated in section 2, neglected.
According to Marlon G. Boarnet (Ross, 2014, p. 90), a specialist in transportation and urban growth at the University of Southern California “Approximately every two generations, we rebuild the transportation infrastructure in our cities in ways that shape the vitality of neighborhoods; the settlement patterns in our cities and countryside; and our economy, society and culture” and as many believe, autonomous driving cars are this new big change everyone is talking about. Leading not only to high impact environmental benefits such as the improvement of fuel economy (Payre, et al. 2014; Luettel, et al., 2012) , through the optimization of highways (Luettel, et al., 2012; Le Vine, et al., 2015; Payre, et al., 2014; Hamish Jamson, et al., 2013; Merat, et al.; 2012), the reduction of required cars to only 15% of the current amount needed (Ross, 2014), and platoon driving that would save to 20-30% fuel consume (Weyer, et al., 2015), but also leading to societal aspects such as immense productivity gains while commuting (Le Vine, et al., 2015; Payre, et al., 2014; Hamish Jamson, et al., 2013), decline on the accident and death tolls considered as the eight highest death cause worldwide in 2013 (World Health Organization, 2013), stress reduction (Rudin-Brown & Parker, 2004a; Stanton & Young, 2005), and the decline of parking space to up to ¼ of the current capacity (Alessandrini, et al., 2015). It would also, according to a study by Morgan Stanley (2013) lead to an average 38 hours reduction of commuting time per individual per year as well as saving the US economy alone 1.3 trillion dollars per year, creating a shift on the possibilities and different applications, developing completely new markets, partnerships and possible business models (Bartl, 2015). That will change the society as we know it.
All the benefits of course, and not only to mention the Technological difficulties do not come without a certain amount of challenges, complications and necessary changes in current systems in order to work. By now several States in the US have passed laws permitting autonomous cars testing on their roads (Walker S., 2014). The National Highway Traffic Safety Administration in the United States (2013) provides an official self-driving car classification dividing into No-Automation (Level 0), Function-specific Automation (Level 1), Combined Function Automation (Level 2), Limited Self-Driving Automation (Level 3) and Full Self-Driving Automation (Level 4). Europeans have also started modifying the Vienna Convention on Road Traffic and the Geneva Convention on Road Traffic (Reuters, 2014) in order to be able to adapt this new technology, but legal issues and doubt still arise as one of the main concerns of discussion. Some of the main issues surrounding the autonomous driving field found throughout the literature and the web are; test and standard set for critical event control, how to deal with the requirement for a ‘driver’, ownership and maintenance (Teare, 2014), civil and criminal liability, corporate manslaughter (Browning, 2014), insurance, data protection and privacy issues (Khan, et al., 2012).
Having a closer look at the history of Autonomous Driving, as explained in the IEEE Spectrum (Ross, 2014) in Figure 1 it can be observed that the technological development and main milestones of the autonomous driving field started already a few decades ago. Leading to a vast analysis of some semi-autonomous features, development of present technologies and understanding on the future problematic while focusing in the near future in the connected car.
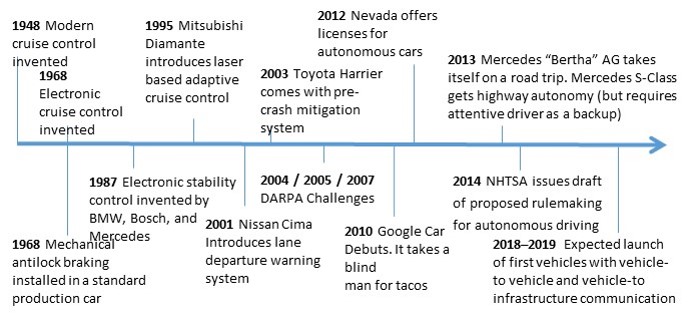
Figure 1: Sixty five years of automotive baby steps (Ross, 2014, p. 62)
One of the main concerns for all semi-autonomous features in the literature is that humans are poor monitors of automation (Bainbridge, 1983) meaning that driving performance declines as automation increases, leading to big safety concerns while being “out of the loop” in case of necessary reaction (Hamish Jamson, et al., 2013; Weyer, et al., 2015; Merat, et al., 2012), situation that is imminent until the technology is fully automated. Moreover John Leonard (Knight, 2013), a MIT professor, reasons that current technology relies on very accurate prior maps and that keeping maps up to date shouldn´t be underestimated, while his colleague Bryan Reimer, a research scientist in MIT’s Age Lab, argues that the most inhibiting factors related to Autonomous driving “will be factors related to the human experience”. Despite the fact that most experiments of full automation with future users have been done in driving simulators (Weyer, et al., 2015) recent studies also point that motion sickness is also higher in self-driving cars. (Sivak & Schoettle , 2015) and that passengers that do not drive, experience discomfort at lower acceleration rates than car drivers do (Le Vine, et al., 2015), not to mention the fear of technology failure (Merat, et al., 2014). Further worries derive from the social impact such as the massive job loss (Morgan Stanley, 2013) as well as the change of social structures as insurance companies, the health industry (Yang & Coughlin, 2014) and public transport systems (Alessandrini, et al., 2015).
1.2 Relevance of customer perspective
Autonomous cars are not that far away, for example Audi and Mercedes (Bartl, 2013) have announced almost being ready from production in highly automated features. As a reflection of the daily news, we can steadily see how this technology manages to get closer to be in our everyday life, with examples of cars driving a blind man for tacos already on 2012 (Google, 2012), coast to coast trips (CNN, 2015), an Italy to China trip (Broggi, et al., 2013) and 700,000 miles already travelled by Google (Urmson , 2014). But main automakers in the race such as Audi, BMW, Cadillac, Ford, General Motors, Jaguar, Land Rover, Lincon, Mercedes-Benz, Nissan, Tesla and Volvo, are trying to integrate it slowly to their models despite the fairly readiness of the technology. This can be interpreted as a futile attempt to keep this totally disruptive technology under control and to have overall slower customer integration, but this old model will prove to be not good enough due to the magnitude and impact of this technology (Bartl, 2015).
According to a survey with more than 200 experts on autonomous vehicles by the IEEE (2014), the world’s largest professional association for the advancement of technology, the three biggest obstacles to reach the mass adoption of driverless cars are: legal liability, policymakers and customer acceptance, while the following three; cost, infrastructure and technology are seen as less of a problem. In the next section we can see through a literature review how the development of research has focused mainly on technology development and just begun to focus on legal liability and policymakers while research on customer acceptance has been more limited.
For all the reasons mentioned above from the IEEE Interview, the authors and experts focus on the technology in relation with human interaction (Knight, 2013; Yang & Coughlin, 2014), the general a priori acceptability of autonomous driving in recent and smaller studies (Payre, et al., 2014), the companies approach to the technology introduction, as well as recent studies with future users concluding that trust and acceptance increases with high antrophormism in technology (Waytz, et al., 2014). It is essential to start understanding and integrating customers in order to build deep and meaningful customer insights which can be used to deliver the products that the customers are looking for (Bartl, et al., 2012; Von Hippel, 2005) The following section demonstrates the research gap on the topic through a literature review focused on a systematic keyword search among the most popular literature databases.
2. Review and analysis of Literature on Autonomous Driving
In order to understand the development of research in autonomous driving in the last years, it is important to conduct a literature review to understand the different fields of application through which autonomous driving has evolved as well as to identify research gaps. Therefore in the next sections the research process, methodology and findings of the literature review are presented.
2.1 Methodology & Data Collection Procedure
The research conducted focused in a systematic keyword search in the topic section of literature databases, including EBSCO, Science Direct, Emerald and ISI web of knowledge. The search conducted included the specific terms, “Autonomous driving”, “Self driving car” and “Driverless car” either in the title, keywords or abstract and including only academic journals listed in the mentioned databases. Hence, the aim of this research was not to find all literature regarding Autonomous Driving that because of its size would lead to an enormous amount of results due to the extensive applications, testing and research in other fields (robotics, underwater vehicles, military, aeronautics, space vehicles, etc.), but to achieve an overview and overall classification to identify current gaps in the scientific literature body. Therefore taking into consideration only the literature publications relevant for roads, traffic, crossroads and studies related to commuting, transportation or production, and including all relevant publications found related to the automotive industry, as well as also considering papers in other topics that acknowledge that the application could be relevant for self-driving cars.
The search yielded 483 papers, 154 of which were found in EBSCO, 122 in Science Direct, 8 in Emerald and 199 in ISI Web of Knowledge. Furthermore, a thorough analysis of abstracts, titles and journals was conducted in order to eliminate duplicates and results that were found in more than one database, leading to the elimination of 63 repetitions, some of which were even found 3 times, reflecting the thoroughness of the search, delivering a total amount of 420 publications. Finally a last filtering process eliminated publications not fulfilling scientific standards nor a peer-review process lead to the exclusion of 21 further publications delivering a final number of 399 Publications, which can be found in Appendix I.
A set of analysis explained in the next sections were then conducted with the remaining 399 publications in order to understand of the current state of the literature, its focus and development over time.
2.2 Findings
2.2.1 Analysis of publications over time
Through this method, good insight can be gained on the origin and development of a research field over time (Dahlander & Gann, 2010). As shown in Figure 2 we can observe the development of self-driving cars research throughout the last decades, demonstrating at the same time a continuous increase of the interest on the topic as well as important milestones that can also influence the topic development and research such as in this case the DARPA Grand Challenges in the beginning of 2004 and end of 2005 or the Urban Challenge in the end of 2007 (DARPA, 2015), that were relatively important events in the field. Furthermore, from 2013 to 2014 a rapid increase of 60.8% can be observed, which can be related to the actual interest on the topic.
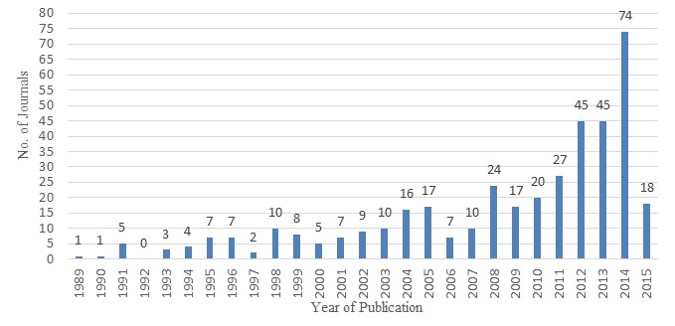
Figure 2: Analysis of Publications over time
2.2.2 Journal Count Analysis
Furthermore a journal count analysis was conducted in order to understand which journals were more dedicated to the topic depending on the amount of articles released, all journals with more than 5 publications are shown in Figure 3. “IEEE Transactions on Intelligent transportation systems.“ and “Robotics and Autonomous Systems” resulted to be the ones more focused on the topic with 17 publications each. This analysis shows the first hint on the natural focus of the literature in the technology development phase, as most of the listed journals are mainly technical and not specialized in the field of business and management.
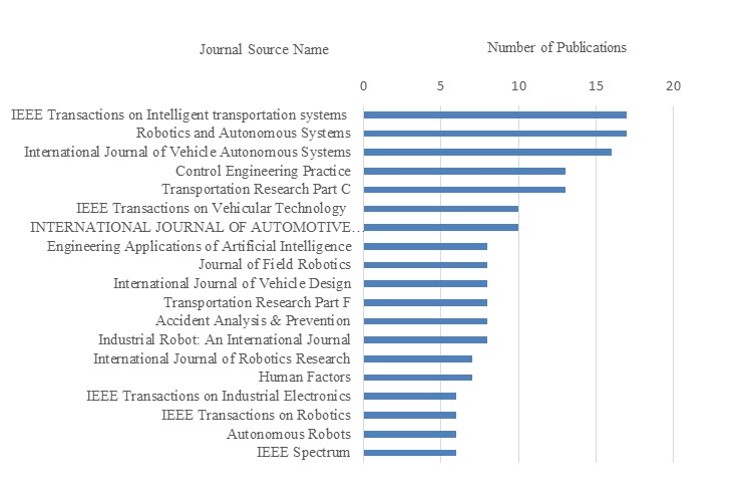
Figure 3: Journal Publication Count
2.2.3 Citation Analysis
In addition and in order to examine the impact of published articles in a field (Leone, et al., 2012) , the well-established procedure of citation analysis was conducted, known as one of the most effective tools to analyze research performance (Chubin & Hackett , 1990; Martin, 1996) it was conducted by analyzing all 399 publications found, through the Publish or Perish tool (Harzing, 2007), the search yielded the citation count of 374 of the 399 publications leading to 25 results (6.2%) which were not found by Publish or Perish. The top results are reflected in Table 1.
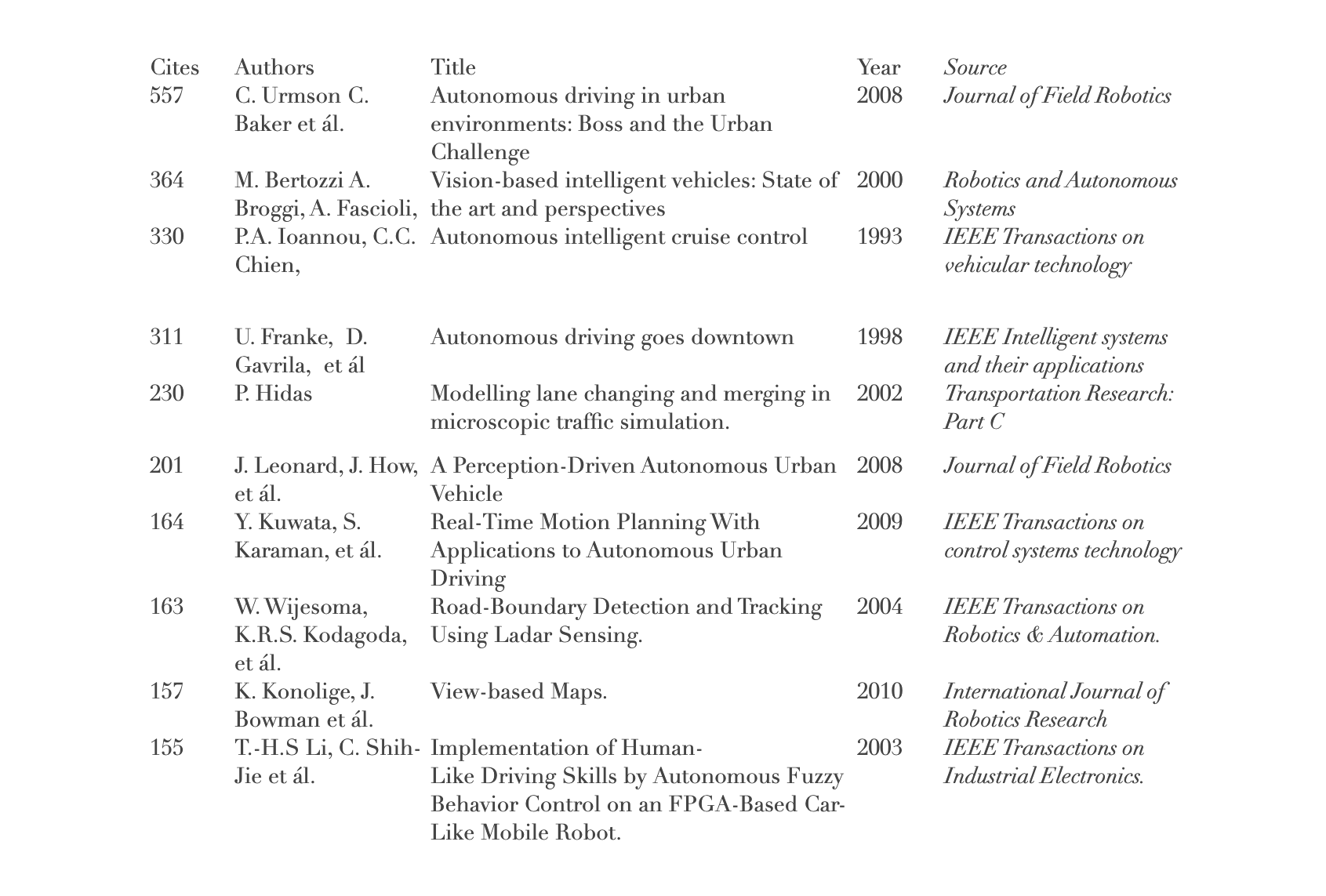
Table 1: Most cited publications in the Autonomous Driving field
From this analysis it is interesting to notice not only that the most cited paper is directly related to the DARPA Urban Challenge but also that it is relatively recent, reflecting again the actual interest on the topic. Further analysis of the results indicates also and as detailed in next section that most cited publications are mainly focused on the technological development of Autonomous Driving Technologies.
2.2.4 Publications topic analysis
Finally a publication topic analysis was conducted; according to the title, abstract and keywords, all papers were catalogued through a qualitative process in the following 5 categories; Technology Development, Foresight and Trend, Law and Regulations, Environmental Impact, and User Acceptance of Technology. All 399 papers were categorized; results are reflected in Figure 4.
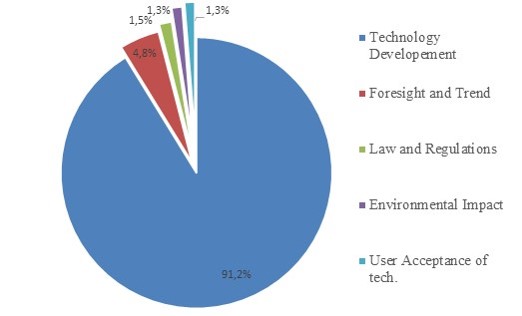
Figure 4: Topic distribution
3. Conclusion
It can be observed that these results directly reflect the state of development of the industry, which is also starting to show interest in future research paths that begin to develop and point towards the research gaps that need to be addressed in the future such as the user acceptance of technology, to which it is also important to note that all 5 publications found, that account for the 1.3 % of the total, were released in the last 5 years.
Consequently, based on the presented results, and the analysis of the evolution in the field, it has been demonstrated that near to 91% of the research focuses on the technology development and the existing research gap on the user acceptance of the technology. Further research is needed to understand user acceptance and to integrate customer perspective into a field that has been mainly technology driven.
Would you like to download this article?
References
Alessandrini, A., Campagna, A., Delle Site, A. & Filippi, F., 2015. Automated Vehicles and the Rethinking of Mobility and Cities. Transportation Research Procedia, Band 5, pp. 145-160.
Bainbridge, L., 1983. Ironies of Automation. Automatica, 19(6), p. 775–779.
Bartl, M., 2013. The Future of Autonomous Driving blog. [Online] Available at: http://www.scoop.it/t/autonomousdriving [Zugriff am 4 Mai 2015].
Bartl, M., 2015. The Future of Autonomous Driving – Introducing the Foresight Matrix to Support Strategic Planning. [Online] Available at: www.makingofinnovation.com [Zugriff am 29 April 2015].
Bartl, M., Füller , J., Mühlbacher, H. & Ernst, H., 2012. A manager’s perspective on virtual customer integration for new product development. Journal of Product Innovation Management, 29(6), pp. 1031-1046.
Bertozzi, A. M., Broggib, A. & Fascioli, A., 2000. Vision-based intelligent vehicles: State of the art and perspectives. Robotics and Autonomous Systems, 31 July, 32(1), pp. 1-16.
Broggi, A. et al., 2013. Extensive Tests of Autonomous Driving Technologies. IEEE TRANSACTIONS ON INTELLIGENT TRANSPORTATION SYSTEMS, 14(3).
Browning, J. G., 2014. Emerging Technology and Its Impact on Automotive Litigation. Defense Counsel Journal, 81(1), pp. 83-90.
Chubin, D. E. & Hackett , . E. J., 1990. Peerless science: peer review and US science policy, New York: Albany, State University of New York..
CNN, 2015. Money.CNN. [Online] Available at: http://money.cnn.com/2015/04/03/autos/delphi-driverless-car-cross-country-trip/ [Zugriff am 6 July 2015].
Dahlander, L. & Gann, D. M., 2010. How open is innovation?. Research Policy, 39(6), pp. 699-709.
DARPA, C., 2015. http://www.darpa.mil/. [Online] Available at: http://archive.darpa.mil/grandchallenge/overview.html [Zugriff am 10 April 2015].
Franke, U. et al., 1998. Autonomous driving goes downtown. IEEE INTELLIGENT SYSTEMS & THEIR APPLICATIONS, 13(6), pp. 40-48.
Google, 2012. Youtube. [Online] Available at: https://www.youtube.com/watch?v=cdgQpa1pUUE [Zugriff am 6 July 2015].
Hamish Jamson, A., Merat, N., Carsten, O. M. & Lai, F. C., 2013. Behavioural changes in drivers experiencing highly-automated vehicle control in varying traffic conditions. Transportation Research Part C, Band 30, pp. 116-125.
Harzing, A. W., 2007. [Online] Available at: http://www.harzing.com/pop.htm
Hidas, P., 2002. Modelling lane changing and merging in microscopic traffic simulation. Transportation Research: Part C, 10(5/6), p. p351. 21p.
IEEE, 2014. www.ieee.org. [Online] Available at: http://www.ieee.org/about/news/2014/14_july_2014.html [Zugriff am 29 April 2015].
Ioannou, P. & Chien, C., 1993. Autonomous intelligent cruise control. IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY, 42(4), pp. 657-672.
Khan, A. M., Bacchus, A. & Erwin, S., 2012. Policy challenges of increasing automation in driving. IATSS Research, 35(2), p. 79–89.
Knight, W., 2013. MIT Technology Review. [Online] Available at: http://www.technologyreview.com/featuredstory/520431/driverless-cars-are-further-away-than-you-think/ [Zugriff am 29 April 1015].
Konolige, K. et al., 2010. View-based Maps.. International Journal of Robotics Research.Jul2010, Vol. 29 Issue 8, p941-957. 17p. DOI: 10.1177/0278364910370376. , Database: Business Source Complete, 29(8), pp. p941-957. 17p.
Kuwata, Y. et al., 2009. Real-Time Motion Planning With Applications to Autonomous Urban Driving. IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY, 17(5), pp. 1105-1118.
Le Vine, S., Zolfaghari, A. & Polak, J., 2015. Autonomous cars; The tension between occupant experience and intersection capacity. Transportation Research Part C, Band 52, pp. 1-14.
Leonard, J. et al., 2008. A Perception-Driven Autonomous Urban Vehicle. JOURNAL OF FIELD ROBOTICS, 25(10), pp. 727-774.
Leone, R. P., Robinson, L. M., Bragge, J. & Somervuori, O., 2012. A citation and profiling analysis of pricing research from 1980 to 2010. Journal of Business Research, 65(7), pp. 1010-1024.
Li, T.-H., Chang, S.-J. & Chen, Y.-X., 2003. Implementation of Human-Like Driving Skills by Autonomous Fuzzy Behavior Control on an FPGA-Based Car-Like Mobile Robot.. IEEE Transactions on Industrial Electronics, 50(5), pp. p867-880. 14p.
Luettel, T., Himmelsbach, M. & Wuensche, H.-J., 2012. Autonomous Ground Vehicles—Concepts and a Path to the Future. PROCEEDINGS OF THE IEEE , 100 (Special Issue: SI ), pp. 1831-1839.
Martin, B. R., 1996. The use of multiple indicators in the assessment of basic research. Scientometrics, 36(3), pp. 343-362.
Merat, N. et al., 2014. Transition to manual; Driver behaviour when resuming control from a highly automated vehicle. Transportation Research Part F: Traffic Psychology and Behaviour, Band 27 Part B , pp. 274-282.
Morgan Stanley, 2013. Autonomous Cars, Self-Driving the New Auto Industry Paradigm, s.l.: s.n.
NHTS, 2013. Preliminary Statement of Policy Concerning Automated Vehicles. s.l.:National Highway Traffic Safety Administration.
Payre, W., Cestac, J. & Delhomme, P., 2014. Intention to use a fully automated car; Attitudes and a priori acceptability. Transportation Research Part F: Traffic Psychology and Behaviour, Band 27, Part B, pp. 252-263.
Reuters, 2014. Reuters. [Online] Available at: http://www.reuters.com/article/2014/05/19/us-daimler-autonomous-driving-idUSKBN0DZ0UV20140519
[Zugriff am 30 April 2015].
Ross, P. E., 2014. Robot, you can drive my car; Autonomous driving will push humans into the passenger seat. IEEE SPECTRUM , 51(6), pp. 60-90.
Rudin-Brown, C. M. & Parker, H. A., 2004a. Behavioural adaptation to adaptive cruise control (ACC): Implications for preventive strategies. Transportation Research Part F, 7(2), p. 59−76.
Sivak, M. & Schoettle , B., 2015. Motion Sickness in Self-Driving Vehicles. The University of Michigan Transportation Research Institute, pp. 1-13.
Teare, I., 2014. Technology Law Update. [Online] Available at: http://www.technology-law-blog.co.uk/2014/12/driverless-cars-the-top-10-legal-issues.html
[Zugriff am 30 April 2015].
Urmson , C., 2014. Google Official Blog. [Online]
Available at: http://googleblog.blogspot.de/2014/04/the-latest-chapter-for-self-driving-car.html [Zugriff am 30 April 2015].
Urmson, C. et al., 2008. Autonomous driving in urban environments: Boss and the Urban Challenge. JOURNAL OF FIELD ROBOTICS, 25(8), pp. 425-466.
Von Hippel, E., 2005. Democratizing Innovation. Cambridge: MIT Press.
Walker S., B., 2014. Automated vehicles are probably legal in the United States. 1 Tex. A&M L.Rev. 4011.
Waytz, A., Heafner, J. & Epley, N., 2014. The mind in the machine; Anthropomorphism increases trust in an autonomous vehicle. Journal of Experimental Social Psychology, Band 52, pp. 113-117.
Weyer, J., Fink, R. D. & Adelt, F., 2015. Human–machine cooperation in smart cars. An empirical investigation of the loss-of-control thesis. Safety Science, Band 72, pp. 199-208.
Wijesoma, W. S., Kodagoda, K. R. & Balasuriya, A. P., 2004. Road-Boundary Detection and Tracking Using Ladar Sensing. IEEE Transactions on Robotics & Automation, 20(3), pp. p456-464. 9p..
World Health Organization, 2013. Global Status Report on Road Safety, s.l.: s.n.
Yang, J. & Coughlin, J. F., 2014. In-vehicle technology for self-driving cars; Advantages and challenges for aging drivers. International Journal of Automotive Technology, 15(2), p. 333−340.